
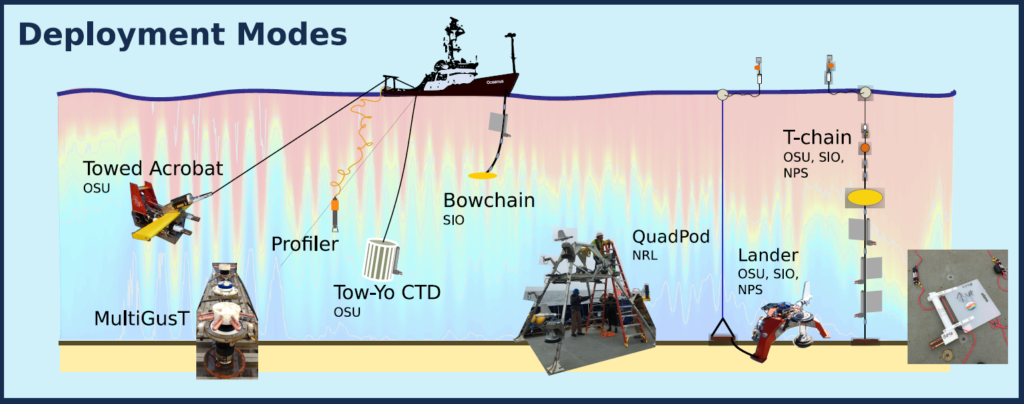
We put considerable engineering time and effort into making the measurements that we need to try to understand how the ocean works. Some of the platforms we have developed are shown here. They carry various sensors, many of which we build ourselves.
χpod
χpods are turbulence instruments deployed on oceanographic moorings. Results obtained from χpods are discussed here.



Chameleon

Chameleon is our shipboard turbulence profiler. Outfitted with shear probes, fast thermistors, conductivity and often optical backscatter and fluorescence sensors, Chameleon provides a detailed measure of the vertical structure of the ocean, including the turbulence. By profiling as rapidly as possible over a few weeks, we develop time series that, combined with acoustic remote sensing of currents and fluid structure, yields informative and quantifiable depiction of fluid processes. An example of how we use these data is referenced below.
The role of turbulence in redistributing upper ocean heat, freshwater and momentum in response to the MJO in the equatorial Indian Ocean, J. Phys. Oceanogr. 48, 197-220, doi: https://doi.org/10.1175/JPO-D-17-0146.1, 2018 (K. Pujiana, J. N. Moum, and W. D. Smyth).
Flippin’ χSOLO (FCS)
FCS floats are autonomous SOLO profiling floats with the addition of shear sensors and fast thermistors to measure microstructure. They were developed with ONR funding and the combined expertise in turbulence measurements from OSU and autonomous platforms from SIO. Implementation of flipping via the internal shifting of the battery pack permits positioning of communication antennae at one end of the float and turbulence sensors at the other. In this way, turbulence profiling of undisturbed fluid is achieved on both DOWN and UP profiles all the way through the sea surface. The surface flip positions communications antennae up and sensors down.

Photo courtesy Ben Reineman
FCS missions can last 45 days when profiling at the rate of roughly 100 profiles per day to 120 m depth. Missions are rescheduled from shore station by remote communications.
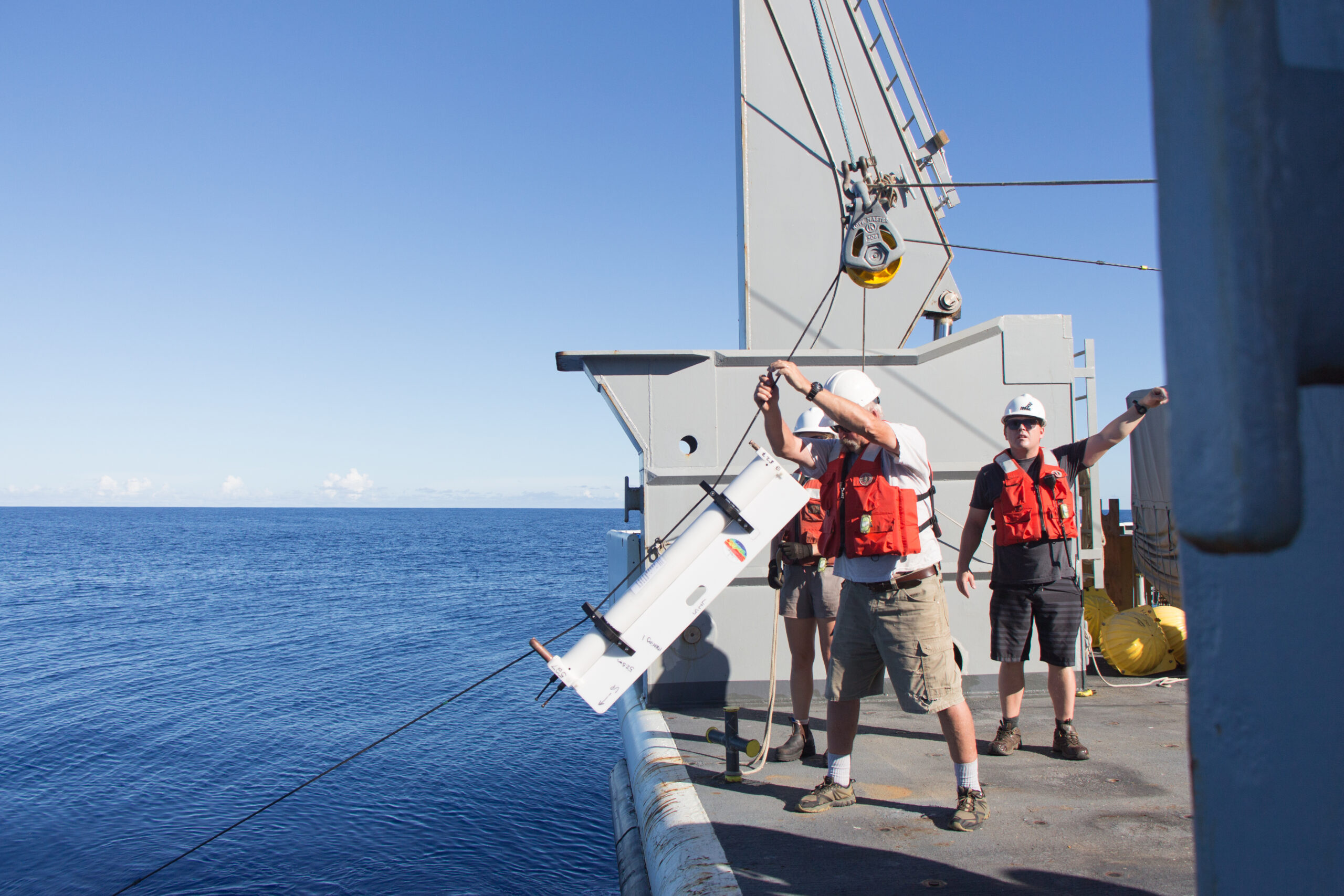
SurfOtter

SurfOtter is a new surface-following platform designed for near-surface oceanographic measurements. Its body consists of a 3-m-long, 0.4-m-diameter aluminum tube attached to a 2-m-deep fin that is tethered to the ship with 200 m of cable. Near the body, the cable divides into a three-point bridle, much like a kite. This forces the body outboard so as to sample water unaffected by the ship.


Heat transport through diurnal warm layers, J. Phys. Oceanogr., 50(10), 2885-2905, doi: 10.1175/JPO-D-20-0079.1, 2020 (K.G. Hughes, J.N. Moum and E.L Shroyer).
Evolution of the velocity structure in the diurnal warm layer, J. Phys. Oceanogr., 50(3), 615-631, doi: 10.1175/JPO-D-19-0207.1, 2020 (K.G. Hughes, J.N. Moum and E.L Shroyer).
GusT
GusT is a miniature χpod intended for experiment long deployments (45 days). We built 80 units for an ONR-sponsored Inner Shelf experiment. They are flexibly-deployed. Some deployment examples are shown here.


GusT on lander 
GusT on mooring 
GusT on a towed platform
Turbulence asymmetries in bottom boundary layer velocity pulses associated with onshore-propagating nonlinear internal waves., J. Phys. Oceanogr., 50(8), 2373-2391, doi: 10.1175/JPO-D-19-0178.1, 2020 (J. Becherer, J.N. Moum, J.A. Colosi, J.A. Lerczak and J.M. McSweeney).
The Inner-Shelf Dynamics Experiment, Bulletin Am. Met. Soc., 1-77, doi: 10.1175/BAMS-D-19-0281.1, 2020 (N. Kumar, J.A. Lerczak, J.N. Moum, J. Becherer et al)
High-Resolution Seafloor Pressure Pods (Ppods)

To measure the seafloor pressure signatures of nonlinear internal waves and form drag (due to the pressure drop across an obstacle), we made improvements to the sampling of OEM pressure sensors and housed them in a pressure case with batteries, acoustics, release weights, GPS receiver and RF antenna. These are deployed as shown (and by helicopter) to sit on the seafloor for weeks to months. To recover, a coded acoustic sequence is transmitted from ship to activate the weight release. The now-buoyant Ppod surfaces, receives a GPS fix and reports it by RF to ship personnel for location.
Seafloor pressure measurements of nonlinear internal waves, J. Phys. Oceanogr., 38(2), 481-491, doi: 10.1175/2007JPO3736.1, 2008 (J.N. Moum and J.D. Nash).
On the potential for automated realtime detection of nonlinear internal waves from seafloor pressure measurements, Appl. Ocean Res., 33, 275-285, doi: 10.1016/j.apor.2011.07.007, 2011 (U. Stoeber and J.N. Moum)
Measurement of tidal form drag using seafloor pressure sensors, J. Phys. Oceanogr., 43, 1150-1172, doi: 10.1175/JPO-D-12-0163.1, 2013 (S.J. Warner, P. MacCready, J.N. Moum and J.D. Nash).
Horizontal variability of high-frequency nonlinear internal waves in Massachusetts Bay detected by an array of seafloor pressure sensors, J. Geophys. Res., 121, 5587-5607, 10.1002/2016JC011866, 2016 (J.A. Thomas, JA. Lerczak and J.N. Moum).
Marlin
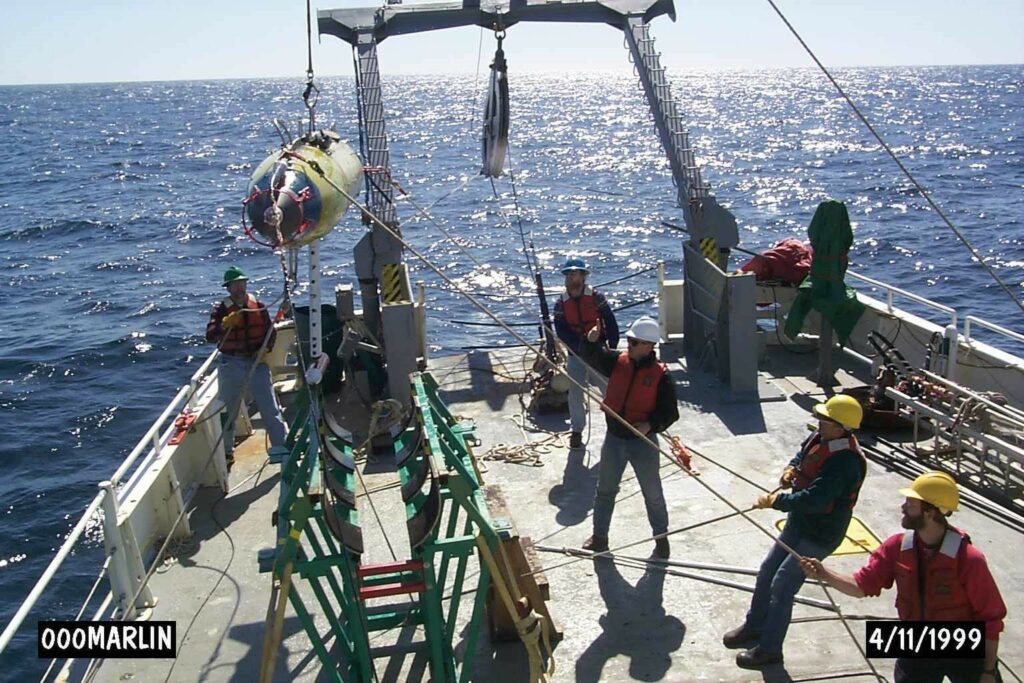
Marlin was a towed body for making deep ocean measurements (to 3500 m depth) above and away from bottom topography. It was outfitted with an array of turbulence, acoustics and inertial navigation sensors. It was towed many 1000s of kilometers along the Oregon coast and throughout the Hawaiian Island chain as part of the Hawaiian Ocean Mixing Experiment (HOME). Marlin is shown being deployed off Oregon. Marlin was a lot of work to maintain and operate and we no longer do so.